CamCal 005 Translation and Rotation
Highlights: In this post we will talk more about the
Tutorial Overview:
1. Translation and Rotation
In order to go from World to Camera frame we need to do translation and rotation. So to review, a translation and rotation from frame \(A\) to \(B\), first we express in the non-homogeneous or regular coordinates. We take the location of some point \(p \) in the \(A \) frame, we rotate it and then we translate it.

In Homogeneous coordinates, we write this as a single matrix multiplication. This matrix consists of the rotation matrix in it in the top left and the translation vector located in the right-hand column.
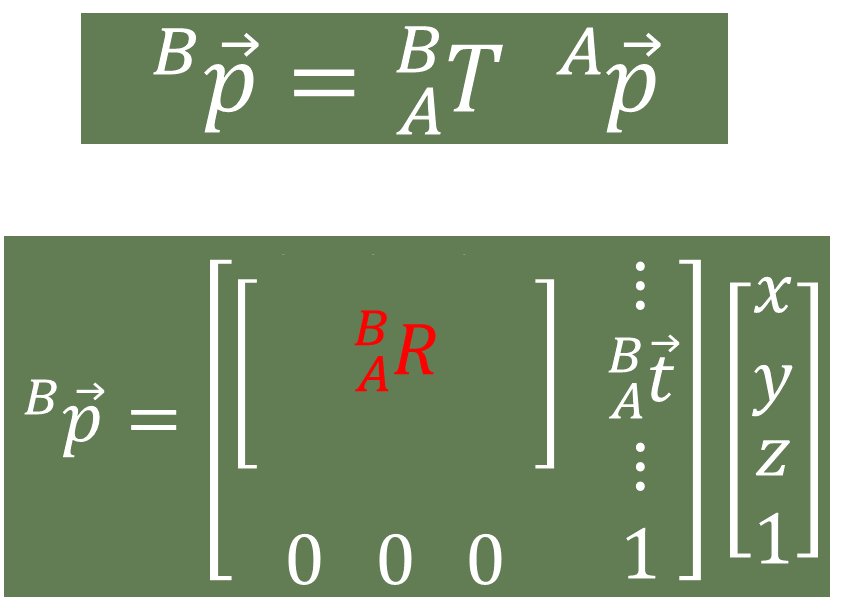
And the key is that homogeneous coordinates allow us to write this coordinate transforms as a single matrix. So, now finally, we can talk about going from World to Camera frame.
2. Going from World to Camera
Here is our equation to go from World to Camera, using nonhomogeneous (regular) coordinates.
Nonhomogeneous coordinates:
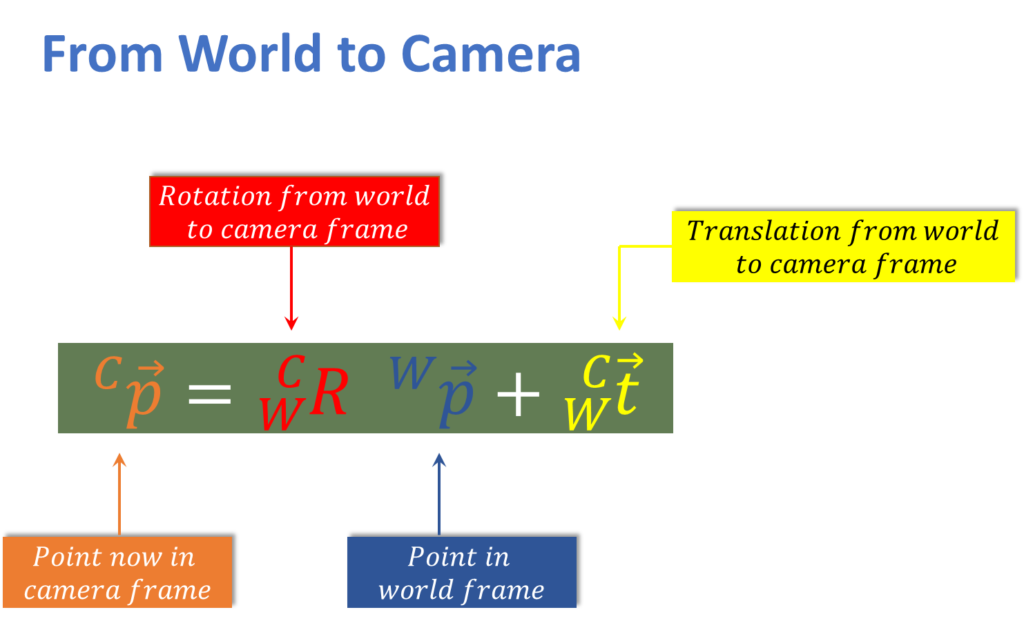
Where the idea is, if we have some point p in the world, so it’s a point location in the world frame, we have to rotate it, orient it with, to know which way it would be oriented in the camera frame, and then we have the translation from the World to Camera frame. So, we have this sort of ugly equation that would get us from a point in the world to a point in the camera so that \(\overrightarrow{_{ }^{C}\textrm{p}} \) frame, that’s now the point in the camera frame.
Inhomogeneous coordinates, it’s just expressed like this.
Homogeneous coordinates:
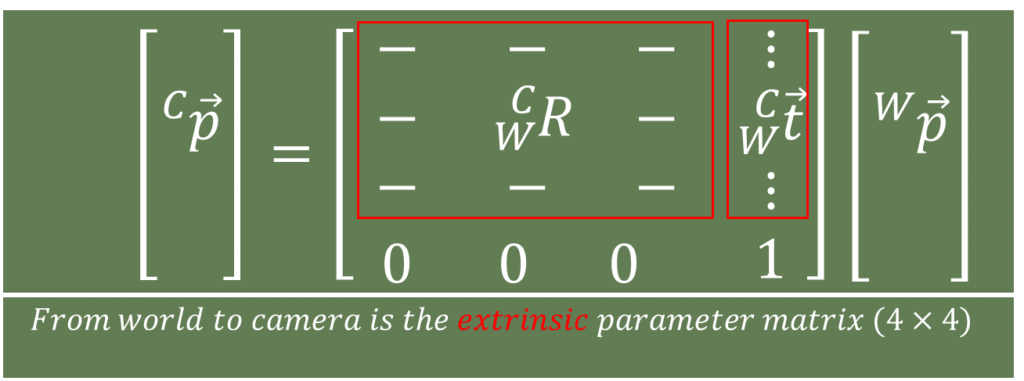
The top left \(3\times 3 \) is the rotation, the right-hand column is the translation. And that whole \(4\times 4 \) is referred to as the extrinsic parameter matrix. This is the matrix that transforms a point in the world to a point in the camera frame. By the way, that bottom row is not so important unless we are doing inverses. What is important is that bottom row is what makes this equation invertible.
Summary:
So that ends the lesson on extrinsics. This is not really a calibration, because we are going to do the calibration part later. So, this was about extrinsic geometry. Later, we are going to do extrinsic calibration where we figure out how a camera is oriented in the world. We are going to have to revisit this whole thing when we talk about mapping from world points to a location on an image plane. But before we can do that, we are going to have to talk about, once we have the location of a point in a camera frame, where does that point end up in the image? And that is the intrinsic and we are going to do that at the next post.
More resources on the topic: