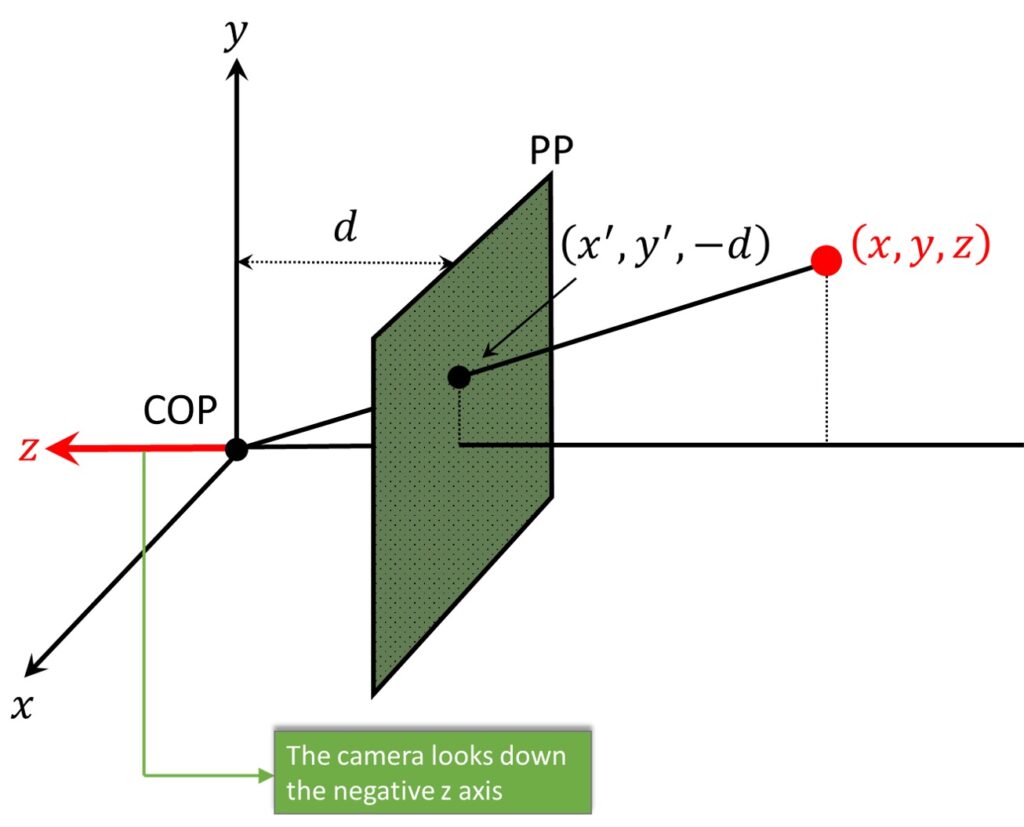
How we can better understand and model the process of mapping our 3D world into a 2D image
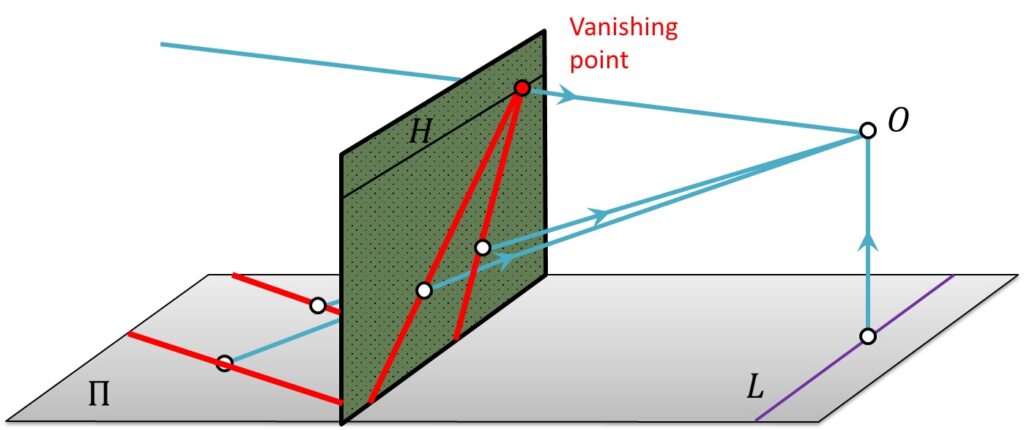
How parallel lines behave differently both in real world and in perspective projection?
Differences between human vision and perspective projection
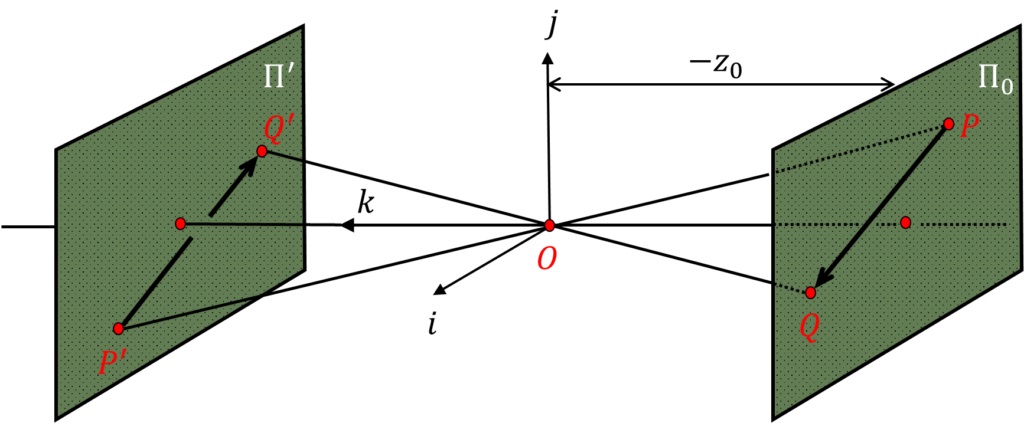
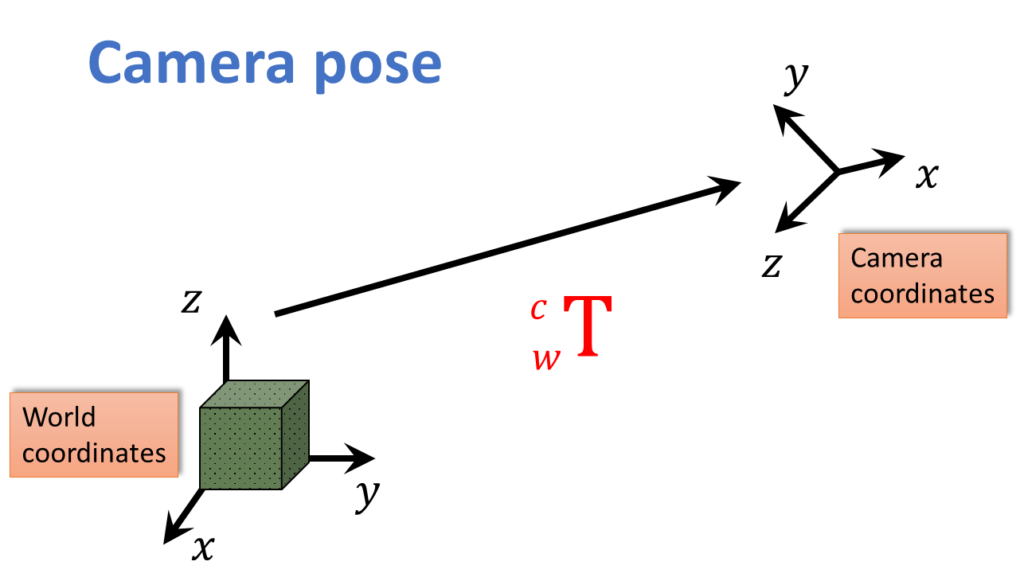
Geometric relationship between the camera and the world
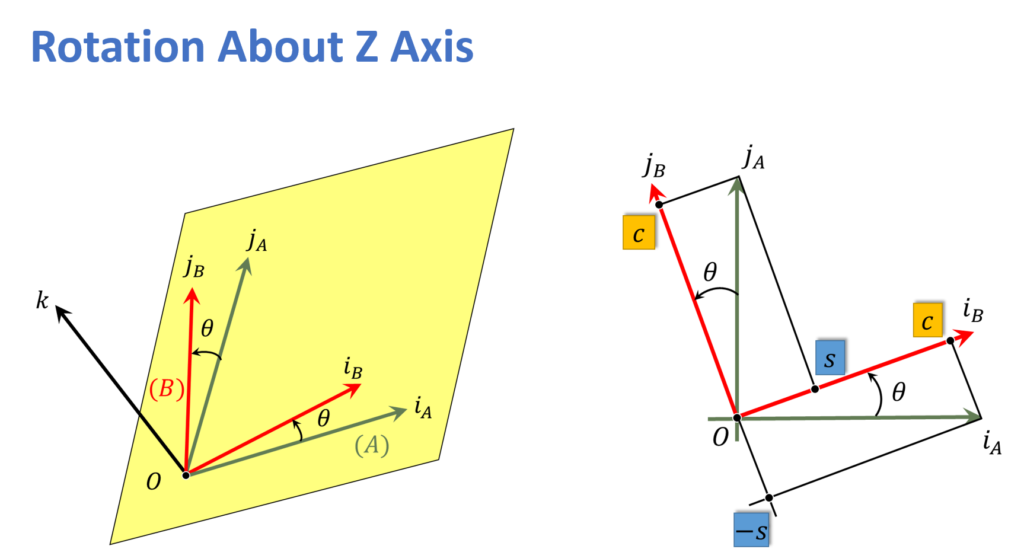
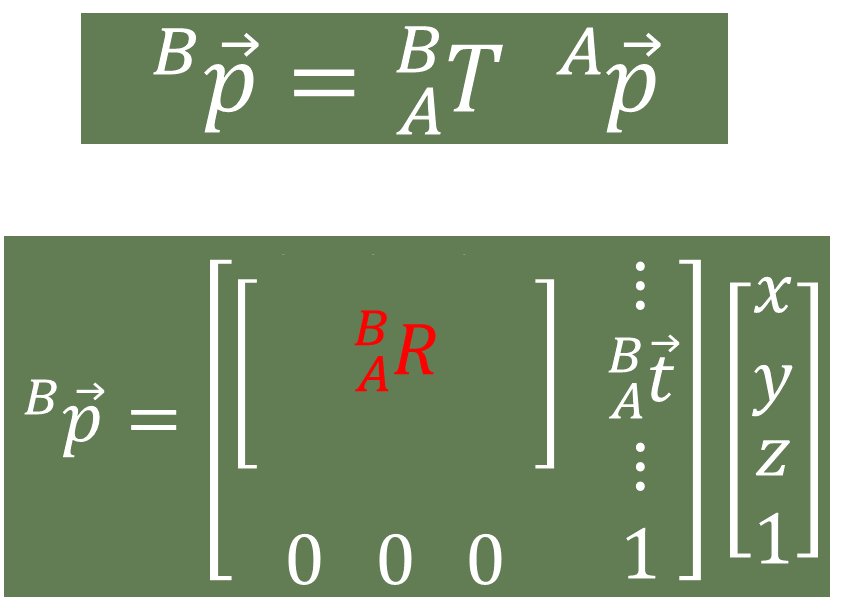
A detailed look how does rotation operator look like
Process of going from World to Camera frame. In order to that we need to apply translation and rotation
The main difference between ideal and real intrinsic parameters
The main idea behind Camera Calibration
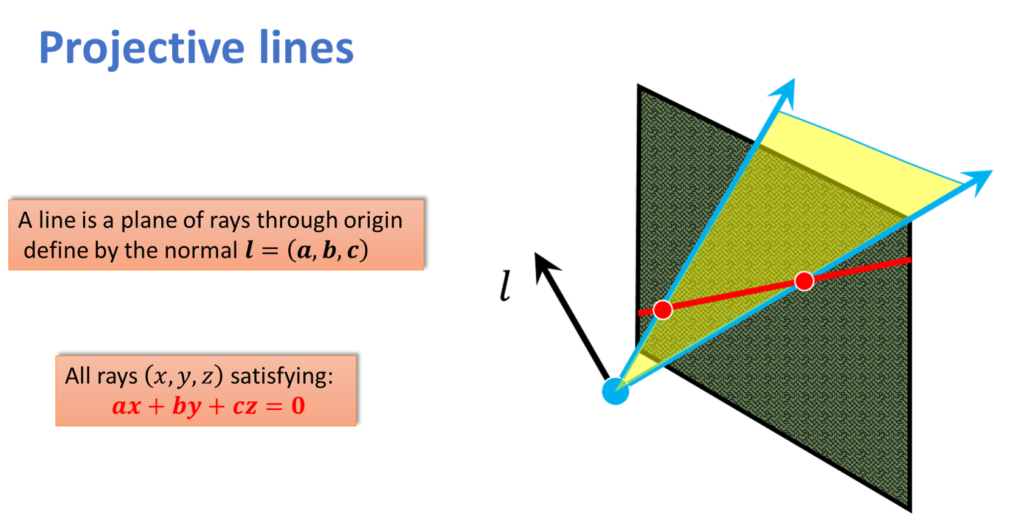
Learn about point and line duality and how to find the line given two points
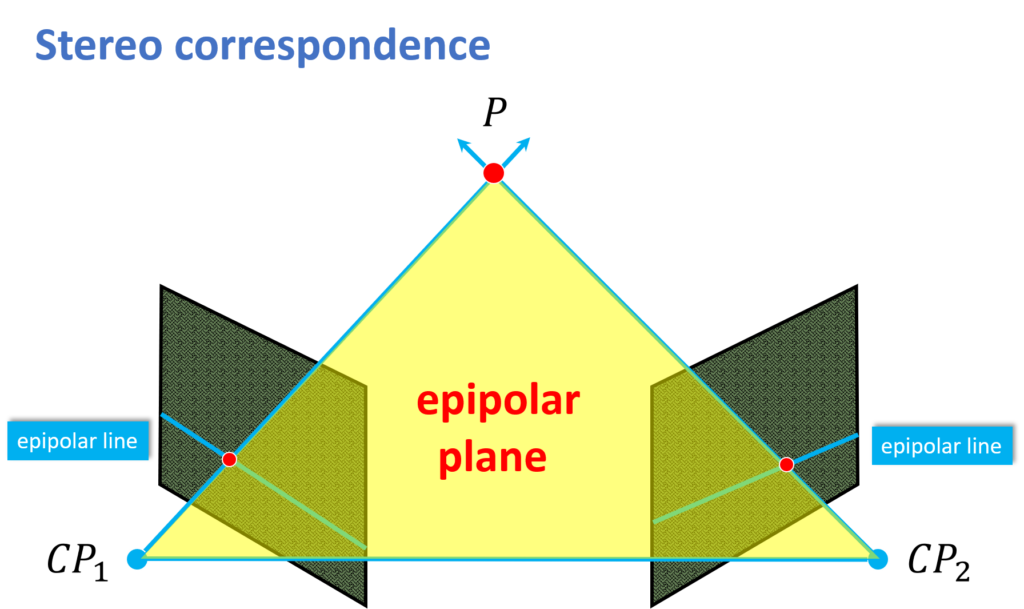
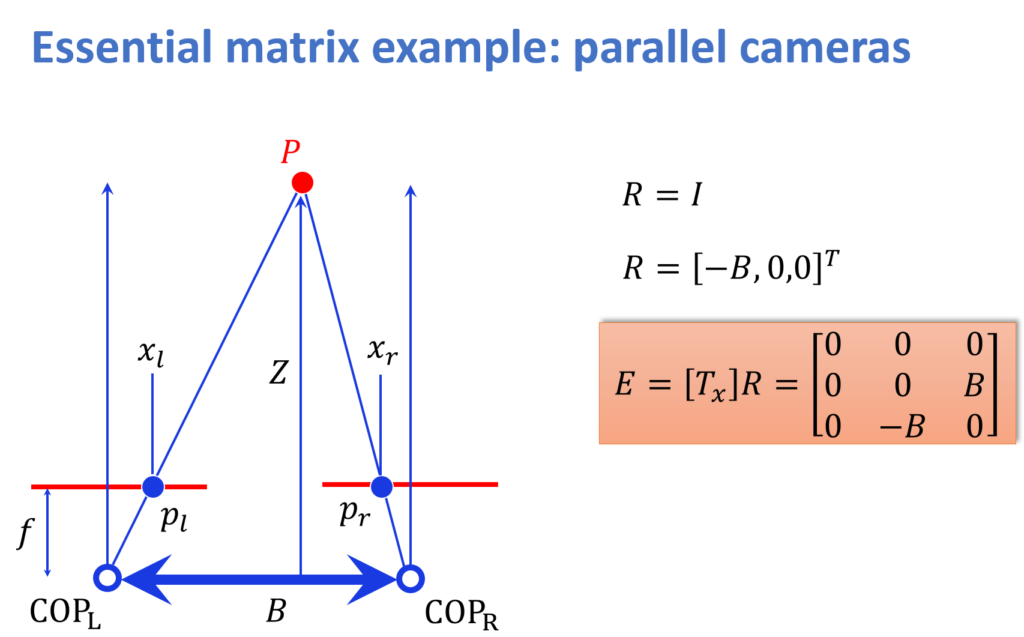
The relationship between two calibrated cameras
Why is the use of the essential matrix important in computer vision?
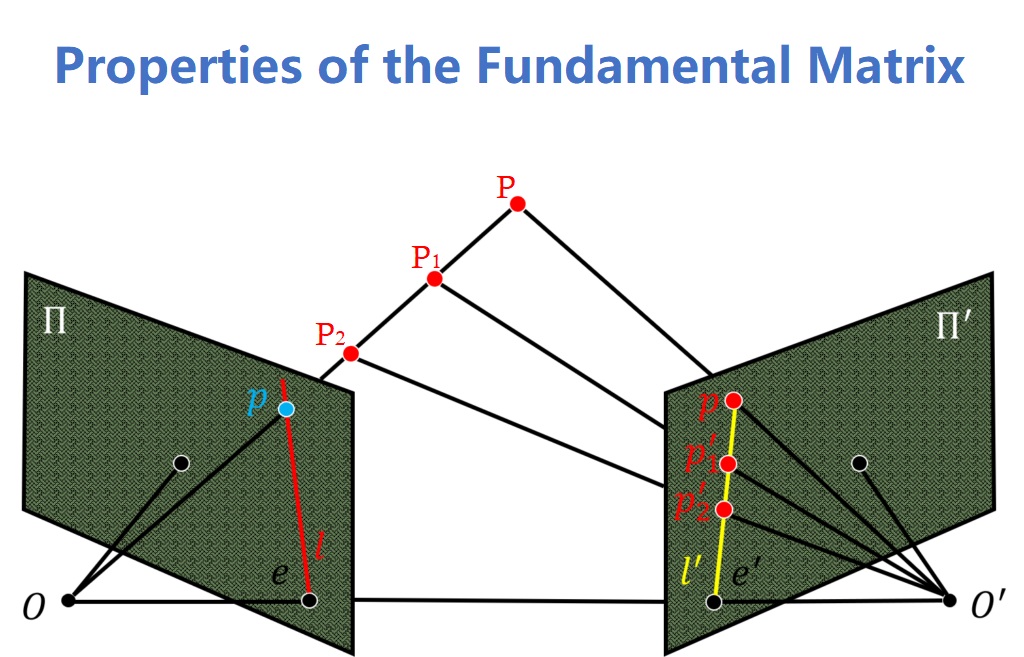
What is the relationship between the pixel coordinates in the two views?
In this post we will present a code that can help us to compute essential matrix, epipolar lines and fundamental matrix
Your Name (required)
Your Email (required)
Your Name