#003 Autonomous Cars – journey through history
In the past couple of years autonomous driving has gone from science fiction fantasy to absolute certainty that will become reality in the near future. It seems like self-driving cars showed up overnight on the roads just a few years ago, but in fact the path to autonomous vehicles has been very, very long. Driverless dream started almost 100 years ago in the early 20th century.
Beginning of driverless dream

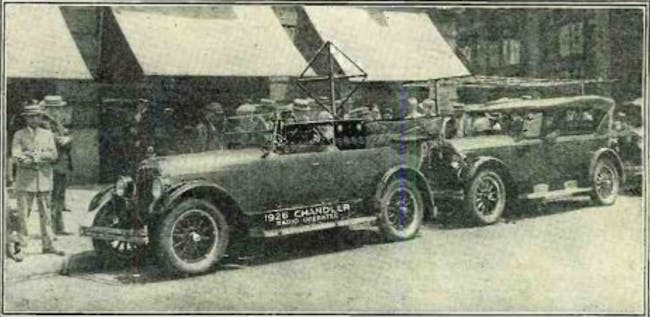
It didn’t take long after the birth of the motorcar for inventors to start thinking about autonomous vehicles. In 1925, Houdina Radio Control Company presented a radio-controlled car which is the first public demonstration of a driverless vehicle in history. The car was guided through traffic on a route along Broadway and Fifth Avenue without anyone at the steering wheel. The signals were sent from another car following close behind. It is funny that this incredible event seemed to people so unbelievable that they assumed it was magic. Houdina’s name sounded sufficiently like that of the famous escape artist and illusionist Harry Houdini, so a lot of people thought this was his latest trick.
A year later, distributor Achen Motor also showcased a remote-controlled car called the “Phantom Auto” on the streets of Milwaukee. Though both events amazed large crowds, they didn’t make life for passengers any easier since vehicles still required someone to control the vehicle from a distance.
City of the future

A new vision of a modern city with much more efficient transportation system came from industrialist Norman Bel Geddes. In 1939, he created the first self-driving car, which was an electric vehicle guided by radio-controlled electromagnetic fields generated with magnetized metal spikes embedded in the roadway. His exhibit “Futurama” was remarkable not only for its innovative ideas but also for the realistic depiction of a city of the future. It introduced expressways as a way to link cities and surrounding communities. He proposed an automated highway system in which cars moved autonomously, allowing passengers to arrive at their destinations safely and in an expedient manner.
By 1958, General Motors had made this concept a reality. The car’s front end was embedded with sensors called pick-up coils that could detect the current flowing through a wire embedded in the road. The current could be manipulated to tell the vehicle to move the steering wheel left or right.
But sadly, the project was eventually aborted after the government opted to cease funding. Few years later a series of successful tests and a prospective analysis showed that implanting the system would over time increase road capacity 50 percent, reduce accidents by 40 percent and would eventually pay for itself by the end of the century.
New approach
Researchers soon came to the conclusion that development of the automated highway system is too complicated and expensive, so they started figuring out new ways to making smarter the car rather than the road.
In 1960 a Stanford engineering graduate student named James Adams was the first who started to implement this renewed approach. He set upon constructing a remote-controlled lunar rover. He initially assembled a four-wheeled car equipped with a video camera to improve navigation. Over the years the idea evolves into a much more intelligent vehicle capable of self-navigating past a chair-filled room all on its own.
In 1977, a team at Japan’s Tsukuba Mechanical Engineering Laboratory developed what many consider to be the first stand-alone autonomous vehicle. They improved upon this idea, using a camera system that relayed data to a computer to process images of the road. However, this vehicle could only travel at speeds below 20 mph.
Further improvement came from the German aerospace engineer Ernst Dickmanns a decade later in the form of the VAMORS. Project backed by Mercedes-Benz resulted in a vehicle outfitted with cameras that could drive itself safely at 56 mph. The first prototype was tested successfully in 1986 and a year later debuted publicly on the autobahn.
Big investments
VAMROS led to the European research organization EUREKA launching the most ambitious project in the field of driverless vehicles called “Prometheus”. Dickmanns and researchers at Bundeswehr Universität München, with an investment of 749,000,000 euros were able to make several advances in camera technology, software and computer processing that resulted in two impressive robot vehicles, the VAMP and VITA-2. They tested a car along a 1,000 kilometer stretch of highway near Paris at speeds of up to 130 kmph.
Across the ocean in the United States, a number of research institutions started to develop their own autonomous car technologies. Investigators at the Carnegie Mellon Robotics Institute in 1986 experimented with a Chevrolet panel van named NavLab 1 that was converted using video equipment, a GPS receiver and supercomputer.

In 1996 Italians entered the game. Professor Alberto Broggi and his team at the University of Parma initiated the ARGO project to pick up where the “Prometheus” left off. They came up with, a Lancia Thema, prototype equipped with two simple black-and-white video cameras and a navigational system based on stereoscopic vision algorithms. The car managed to cover a route of more than 1,200 miles at an average speed of 56 mph.
Next, in early 2000’s, U.S. military began getting involved in the development of autonomous vehicle technology. They announced the DARPA Grand Challenge, a long-distance competition in which $1 million would be awarded to the team of engineers whose vehicle conquers the 150-mile obstacle course. Although none of the vehicles finished the course, the event was considered a success as it contributed to innovation in the field.

Google Self-Driving Car Project begun way back in 2009, with the goal of building a completely autonomous car by 2020. The idea was to build one prototype that would be able to successfully drive itself across real-life scenarios, and finding a solution that would reduce the number of car accidents each year by half. The company chose Stanford University professor Sebastian Thrun to lead this project. He brought on-board engineers who worked on cars that competed in DARPA’s Challenge events. The team started out with seven prototypes, six Toyota Priuses and an Audi TT, which were equipped with an array of sensors, cameras, lasers, a special radar and GPS technology. The system can detect objects such as people and numerous potential hazards up to hundreds of yards away. By 2015, Google cars had logged more than 1 million miles without causing an accident, though they were involved in 13 collisions. The first accident occurred in 2016.
The company has made several other huge strides. They got legislation passed to make self-driving cars street legal in four states and the District of Columbia, unveiled a 100 % autonomous model which they plan to release in 2020. Google is also testing public roads throughout the country under a project named Waymo.
Other companies that have started developing and testing autonomous car technology include Uber, Lyft, Tesla, Microsoft, as well as traditional car manufacturers Mercedes-Benz, BMW, Toyota, Volkswagen, Audi, General Motors, Renault, Nissan and Honda. However, progress on advancing the technology took a major hit when an Uber test vehicle hit and killed a pedestrian in March of 2018. It was the first fatal accident that didn’t involve another vehicle. Uber has since suspended testing of self-driving cars.
Self driving cars today
After almost 100 years long journey today, many vehicles on the road are considered to be semi-autonomous due to safety features like assisted parking and braking systems. Few of them have the capability to drive, steer, brake, and park themselves. Autonomous vehicle technology relies on GPS capabilities as well as advanced sensing systems that can detect lane boundaries, signs and signals, and unexpected obstacles. While the technology isn’t yet perfect, it’s expected to become more widespread as it improves, with some predicting that up to half of the vehicles worldwide will be autonomous by 2025.
References:
- https://fsmedia.imgix.net/17/95/f6/8c/959e/4f9d/b256/ae75ec01518e/the-houdina-radio-car-circa-1925-it-was-dubbed-american-wonder.png?auto=format%2Ccompress&w=650 (1)
- https://static01.nyt.com/images/2012/12/09/books/review/1209HELLER01/1209HELLER01-popup.jpg (2)
- https://toddneff.com/wp-content/uploads/2018/06/EG-navlab1-CMU-media-relations.jpg (3)
- https://www.extremetech.com/wp-content/uploads/2016/12/Waymo_FCA_Fully_Self_Driving_Chrysler_Pacifica_Hybrid_1-640×360.jpg (4)
- Top 5 autonomous driving systems in the world (5)



{kind=link}
{kind=link}
{kind=link}
{kind=link}